Produits similaires
-

Servomoteur SM-10
€ 27,40 -

Lot de 6 servos Dynamixel MX-28T
€ 1.519,51 -

TURTLEBOT3 Râpe à burger PI 3
€ 746,34 -

CM-700
€ 164,85
€ 247,40
*Tous les prix s'entendent hors TVA
un contrôle précis et personnalisable.
Tirez le meilleur parti de votre robot grâce au puissant processeur ARM Cortex-M7 et à la compatibilité avec les servos Dynamixel.
Description + détails
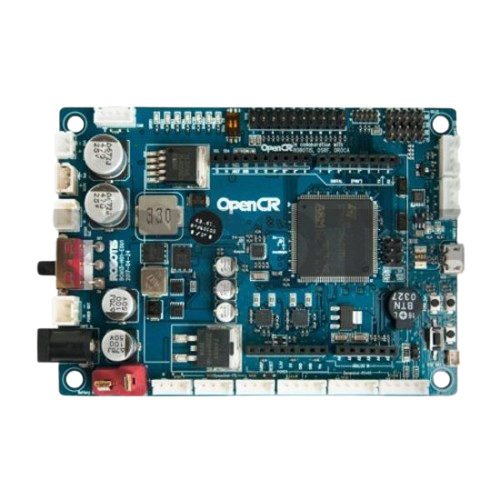
La carte OpenCR 1.0 peut être utilisée à la fois comme contrôleur de robot open source (pour TurtleBot3 par exemple), plutôt qu'un microcontrôleur avec son processeur 32 bits avec FPU, cadencé à 216 MHz. Cela signifie que vous aurez accès à l'ensemble du code de programmation, des schémas, des logiciels et du matériel conçus pour la plateforme éducative TurtleBot 3.
Ce robocontrôleur et microcontrôleur open source supporte les communications RS-485 et TTL (pour les servos Dynamixel R et T), ainsi que les protocoles UART et CAN.
Il intègre également un circuit USB et un connecteur GPIO à 18 broches pour développer votre projet.
En plus de la possibilité de connecter de nombreux modules périphériques à votre carte ROS, la carte OpenCR 1.0 intègre une centrale inertielle 9 axes (gyroscope, accéléromètre et magnétomètre 3 axes) pour un meilleur contrôle de la position, de la rotation, de l'altitude et de la vitesse de votre robot mobile. 2 boutons et 4 LED utilisateur complètent ce tableau déjà attrayant, ainsi qu'une sortie LED rouge/verte pour indiquer l'état de la communication USB.
Il comprend
Parler à un expert
Vous avez des questions sur le choix d'un produit ou d'une solution pour votre application, ou sur vos projets d'automatisation ? Remplissez le formulaire et un expert en automatisation de notre équipe vous contactera dans les 24 heures.