OpenCR 1.0: Il Robocontroller Essenziale per Robot e Progetti Educativi
La scheda **OpenCR 1.0** è una soluzione versatile e potente, progettata per funzionare sia come **controllore di robot open source**, ideale per il famoso TurtleBot3, sia come microcontrollore avanzato. Con il suo processore **a 32 bit**, funzionante fino a **216 MHz**, potrai accedere a un vasto repertorio di codici, schemi e risorse software dedicati alla piattaforma educativa **TurtleBot 3**.
Questa scheda si distingue perché è un **robocontroller open source** integrato con protocolli di comunicazione come **RS-485** e **TTL**, perfetta per collegare servi **Dynamixel R e T**. Inoltre, è dotata di un circuito **USB** e di un connettore **GPIO** a 18 pin, rendendola un’ottima opzione per sviluppare i tuoi progetti di robotica.
Una Piattaforma di Navigazione per Robot Avanzati
Grazie alla sua compatibilità con numerosi moduli periferici, l’OpenCR 1.0 offre un’incredibile **platforma di navigazione**. È dotata di un’unità di movimento inerziale a 9 assi, che combina giroscopio, accelerometro e magnetometro per un controllo preciso della posizione, rotazione, altitudine e velocità del tuo robot mobile. Inoltre, la scheda è equipaggiata con 2 pulsanti e 4 LED per l’utente, oltre a un’uscita LED rossa/verde, che ti permette di monitorare lo stato della comunicazione USB con facilità.
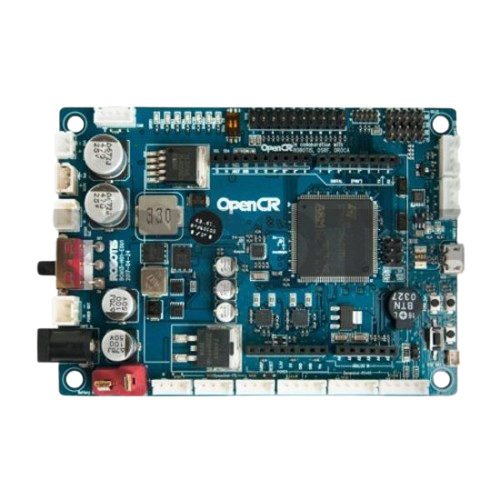
Specifiche Tecniche della Scheda OpenCR 1.0
- Processor: STM32F746ZGT6 – microcontrollore ARM Cortex®-M7 a 32 bit con FPU (216 MHz, 462 DMIPS)
- Sensori: giroscopio a 3 assi, accelerometro a 3 assi, magnetometro a 3 assi (MPU9250)
- Programmatore: connettore ARM Cortex JTAG/SWD a 10 pin; supporto USB DFU; seriale
- Pin di espansione: 32 pin (L14, R18) con connettività Arduino; 4 pin per modulo sensore; connettore a 18 pin
- Comunicazione: USB (micro-B, USB 2.0, host/periferica, OTG); TTL (B3B-EH-A/Dynamixel); RS485 (B4B-EH-A/Dynamixel); UART x 2; CAN
- LED e pulsanti: indicatore di comunicazione USB (LD2 rosso/verde); 1 LED rosso (LD3), 1 LED verde (LD4), 1 LED blu (LD5); 2 pulsanti utente
- Alimentazione: 5 V (USB VBUS), 7-24 V (batteria o SMPS)
- Batteria: LiPo da 11,1 V 1800 mAh 19,98 Wh
- SMPS: 12 V 5 A
- Uscite esterne: 12 V @ 1 A (SMW250-02), 5 V @ 4 A (5267-02A), 3,3 V @ 800 mA (20010WS-02)
- Porta batteria esterna: Molex PSTN 53047-0210
- LED di alimentazione: LD1 (rosso, 3,3 V)
- Pulsante di reset e interruttore on/off integrato
- Dimensioni: 105 x 75 mm
- Peso: 60 g
Cosa Include
- 1 x controller OpenCR1.0
- 1 x cavo USB Micro B




















